El Impresionante Mundo de la Robotica
¿Que es la robótica?
La robótica es la rama de la ingeniería mecánica, de la ingeniería eléctrica, de la ingeniería electrónica, de la ingeniería biomédica, y de las ciencias de la computación, que se ocupa del diseño, construcción, operación, estructura, manufactura, y aplicación de los robots.
La robótica combina diversas disciplinas como la mecánica, la electrónica, la informática, la inteligencia artificial , la ingeniería de control y la física. Otras áreas importantes en robótica son el álgebra, los autómatas programables, la animatrónica y las máquinas de estados.
¿Quien fue el Padre de la Robótica?
Joseph Frederick Engelberger
(Nueva York, 26 de julio de 1925-Newtown, 1 de diciembre de 2015)1 fue un
físico, ingeniero y emprendedor estadounidense.
Conocido como el "Padre
de la Robótica Industrial".23 Con la autorización de la patente
concedida al inventor George Devol, Engelberger desarrolló el primer robot
industrial en los Estados Unidos, el Unimate, en la década de 1950. Luego
trabajó como emprendedor y gran defensor de la tecnología robótica, además de
en fábricas, en diversos campos, incluyendo las industrias de servicios, el
cuidado de la salud, y la exploración espacial.
Fechas Importantes en la Historia de la Robótica
- Siglo III a. C. y antes (Yan Shi)
Una de las primeras descripciones de autómatas aparece en el texto Lie Zi, atribuido a Lie Yukou (ca. 350 a. C.), en el que describe el encuentro, ocurrido varios siglos antes, entre el rey Mu de Zhou (1023-957 a. C.) y un «artífice» conocido como Yan Shi. En este encuentro Shi presenta al rey una supuesta obra mecánica: una figura humana de tamaño natural.
- Siglo I a. C. y antes (Ctesibio de Alejandría, Filón de Bizancio, Herón de Alexandria, y otros)
Autómata
Descripciones de más de 100 máquinas y autómatas, incluyendo un artefacto con fuego, un órgano de viento, una máquina operada mediante una moneda, una máquina de vapor, en Pneumática y Autómata de Herón de Alejandría
- 420 a. C. (Arquitas de Tarento)
.Un pájaro de madera a vapor que fue capaz de volar.
- 1206 (Al-Jazari)
Banda de robots, autómata de lavado de manos, pavos reales automáticos
Primeros autómatas humanoides creados, banda de autómata programable.
- 1495 (Leonardo da Vinci)
Caballero mecánico
Diseño de un robot humanoide.
- 1738 (Jacques de Vaucanson)
Digesting Duck
Pato mecánico capaz de comer, agitar sus alas y excretar.
- 1800 ( Hisashige Tanaka)
Juguetes Karakuri
Juguetes mecánicos japoneses que sirven té, disparan flechas y pintan.
- 1921 (Karel Čapek )
Rossum's Universal Robots
Aparece el primer automata de ficcion llamador "robot", aparece en R.U.R.
- 1930(Westinghouse Electric Corporation)
Elektro
Se exhibe un robot humanoide en la Exposición Universal entre los años 1939 y 1940.
- 1942(Isaac Asimov)
SPD-13 (apodado "Speedy")
La revista Astounding Science Fiction publica "círculos Viciosos" (Runaround en ingles). Una Historia de ciencia ficción donde se da a conocer las tres leyes de la robótica.
1. Un robot no hará daño a un ser humano o, por inacción, permitirá que un ser humano sufra daño.
2. Un robot debe cumplir las órdenes dadas por los seres humanos, a excepción de aquellas que entrasen en conflicto con la primera ley.
3. Un robot debe proteger su propia existencia en la medida en que esta protección no entre en conflicto con la primera o con la segunda ley
- 1948 (William Grey Walter)
Elsie y Elmer
Exhibiendo un robot con comportamiento biológico simple.
- 1956(George Devol)
Unimate
Primer robot comercial, de la compañía Unimation fundada por George Devol y Joseph Engelberger, basada en una patente de Devol.
- 1961(George Devol)
Unimate
Se instala el primer robot industrial.
- 1963
Primer robot "palletizing."
- 1971 (Unión Soviética)
Mars 3, dentro del programa Mars
El primer robot soviético que aterriza exitosamente en la superficie de Marte pero se perdió el contacto pocos segundos después.
- 1973 (KUKA Robot Group)
Famulus
Primer robot con seis ejes electromecánicos.
- 1975 (Victor Scheinman)
PUMA
Brazo manipulador programable universal, un producto de Unimation.
- 1976 (NASA)
Viking I
Primer robot estadounidense en Marte.
- 1982(Isaac Asimov)
Robbie, SPD-13 (Speedy), QT1 (Cutie), DV-5 (Dave), RB-34 (Herbie), NS-2 (Néstor), NDR (Andrew), Daneel Olivaw
El robot completo (The Complete Robot en inglés). Una colección de cuentos de ciencia ficción de Isaac Asimov, escritos entre 1940 y 1976, previamente publicados en el libro Yo, robot y en otras antologías, volviendo a explicar las tres leyes de la robótica con más ahínco y complejidad moral. Incluso llega a plantear la muerte de un ser humano por la mano de un robot con las tres leyes programadas, por lo que decide incluir una cuarta ley "la ley 0 (cero)."
- 2011(Honda Motor Co. Ltd)
ASIMO
Robot humanoide capaz de desplazarse de forma bípeda e interactuar con las personas.Robot humanoide capaz de desplazarse de forma bípeda e interactuar con las personas.
- 2015(Hanson Robotics Co. Ltd)
Sophia
Robot humanoide capaz de reconocer, recordar caras y simular expresiones.
Clasificación de los robots por generación
Los robots pueden distribuirse por múltiples variables, como hemos dicho, nosotros nos centraremos en la clasificación según sus aplicaciones. Pero primero daremos un vistazo a la ordenación de los robots por generación, el principio de todo.
1a generación
Son los que se conocen como
robots manipuladores. Su sistema de control está basado en «paradas fijas». Se
utilizan principalmente para mover objetos pero están muy limitados en número
de movimientos. Su función principal es la repetición de tareas programadas.
Son
llamados manipuladores. Son
sistemas mecánicos multifuncionales con un sencillo sistema de control, bien
manual, de secuencia fija o de secuencia variable. Realizan una tarea según una
serie de instrucciones programadas previamente, que ejecutan de forma
secuencial. Este tipo de robots dispone de sistemas de control en lazo abierto,
por lo que no tienen en cuenta las variaciones que puedan producirse en su
entorno
2a generación
Los robots de segunda
generación también obtienen información limitada del entorno y son de mayor
tamaño. No obstante, sus movimientos son más complejos. Se controlan mediante
secuencia numérica. Se usan principalmente en la industria automotriz.
También
llamados robots de
aprendizaje. Repiten una secuencia de movimientos que ha sido
ejecutada previamente por un operador humano. El modo de hacerlo es a través de
un dispositivo mecánico. El operador realiza los movimientos requeridos
mientras el robot le sigue y los memoriza. Este tipo sí tiene en cuenta las
variaciones del entorno. Disponen de sistemas de control en lazo cerrado, con
sensores que les permiten adquirir información del medio en que se encuentran y
adaptar su actuación a las mismas.

3a generación
Su característica principal es
que son reprogramables y son capaces de adquirir alguna percepción de su
entorno mediante sensores. Estos robots se controlan con ordenador, es en esta
generación donde se desarrollan los lenguajes de programación. Es el principio
de los robots inteligentes.
Son también llamados robots
con control sensorizado. El controlador es una computadora que ejecuta las
órdenes de un programa y las envía al manipulador para que realice los
movimientos necesarios. Utiliza las computadoras para su estrategia de control
y tiene algún conocimiento del ambiente local a través del uso de sensores, los
cuales miden el ambiente y modifican su estrategia de control, con esta
generación se inicia la era de los robots inteligentes y aparecen los lenguajes
de programación para escribir los programas de control. La estrategia de
control utilizada se denomina de “ciclo cerrado”.

4a Generación
Llegado a este punto de la
clasificación de los robots, podemos hablar de robots inteligentes capaces de
controlar el proceso y captar su entorno en tiempo real. Poseen mejores
sistemas sensoriales y conceptos de conducta.
Son llamados también robots
inteligentes. Son similares a las anteriores pero ademas poseen sensores que
envían información a la computadora de control sobre el estado del proceso. La
cuarta generación de robots, ya los califica de inteligentes con más y mejores
extensiones sensoriales, para comprender sus acciones y el mundo que los rodea.
Incorpora un concepto de “modelo del mundo” de su propia conducta y del
ambiente en el que operan. Utilizan conocimiento difuso y procesamiento
dirigido por expectativas que mejoran el desempeño del sistema de manera que la
tarea de los sensores se extiende a la supervisión del ambiente global,
registrando los efectos de sus acciones en un modelo del mundo y auxiliar en la
determinación de tareas y metas.

5a Generación
Directamente relacionada con
la inteligencia artificial. El alto desarrollo tecnológico que supone creará
una nueva generación de robots. Serán autónomos y estarán capacitados para
atender las necesidades de los humanos. La investigación tecnológica trabaja
para crear robots capaces de imitar las funciones cognitivas de la mente
humana.
Actualmente está en desarrollo
esta nueva generación de robots, que pretende que el control emerja de la
adecuada organización y distribución de módulos conductuales, esta nueva
arquitectura es denominada arquitectura de subsunción, cuyo promotor es Rodney
Brooks.

Tipos de Robots
En la
actualidad existe una gran variedad de robots con diferentes características,
en este caso se menciona un resumen y se proporciona un enlace de cada uno para
poder ver más información de estos tipos de robots.
Robot
industrial de manipulación: Se podría considerar como una máquina autónoma la
cual puede ser reprogramada para que pueda cumplir su función. Este tipo de
robots tiene varias articulaciones o ejes que permite posicionar y orientar
materiales en el espacio deseado, el movimiento se puede realizar en tres ejes
(x,y,z). En el área de robótica industrial podemos encontrar algunos que se
están fijos y otros que son móviles

Robots
de servicio: Actualmente se utilizan en el hogar para limpieza cuya función
puede ser aspiración, barrenderos, limpiadores de piscinas y otros tipos
diferentes de robots para especificaciones especiales en la limpieza del hogar.
En esta categoría también se encuentran los robots de vigilancia y
telepresencia como servicio a la comunidad.

Robots
de investigación: En las universidades son muy utilizados diferentes tipos de
robots ya sea brazo articulado, móviles, humanoides, hexápodo, etc. Normalmente
son empleados para realizar investigación en el área de inteligencia artificial
sin alguna aplicación concreta pero también se dan casos en las cuales se
realizan investigaciones especiales para la industria privada con aplicaciones
concretas.
Robots
militares: Principalmente son acompañantes y guías de escuadrones militares en
operaciones especiales. Son de diferentes tipos y características los cuales
realizan maniobras como desactivación de bombas, estos pueden ser autónomos o
manipulados por medio de control remoto, robots de carga y aviones para
inspeccionar áreas, para este tipo de tareas podemos encontrar especialmente
los drones. El objetivo principal en este tipo de robots con fines militares es
para implementarse en la búsqueda y rescate de personas.

Robots
médicos: Los podemos encontrar en las instituciones médicas, aunque ya es
posible encontrarlos en nuestros hogares en los casos en que el paciente
requiere un trato especial, principalmente se emplean en la cirugía donde se
utilizan varios brazos robóticos de alta precisión para asistir al cirujano en
las operaciones. También se pueden encontrar las prótesis que tienen un sistema
de mando y es adaptado fácilmente al cuerpo, consiste en suplantar aquellos
órganos o extremidades para un movimiento y funcionamiento correcto. Se podría
considerar dentro de esta categoría algunos vehículos autónomos y máquinas para
levantamiento de personas.
Nano
robots: La nanotecnología es un avance científico y tecnológico para varías
ramas de investigación, en este caso tenemos robots que son insertados en el
cuerpo humano para combatir diferentes enfermedades.
Robots
educacionales: Son empleados particularmente en escuelas en las cuales utilizan
Lego Mindstorms, podemos encontrar diferentes categorías para el aprendizaje
del alumno.
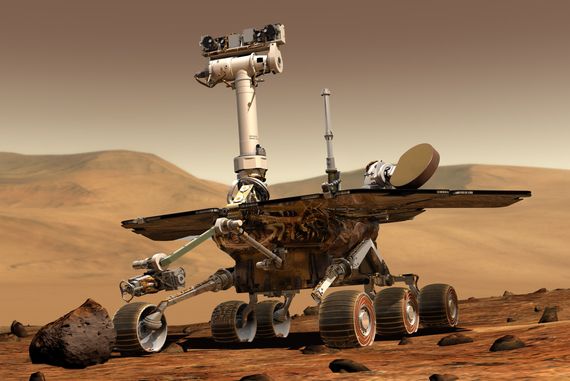
Robots
espaciales: Son utilizados en el espacio, como pueden ser los vehículos que se
emplean en el planeta Marte. Tienen un diseño especial para funcionar en
entornos o condiciones de baja gravedad.
Juguetes
robóticos: Actualmente podemos encontrar muchos tipos de juguetes con
tecnología para perseguir o mostrar alguna acción, como por ejemplo el perro
robot que te sigue a dónde vas y puedes interactuar con él, también podemos
encontrar robots que realizan acciones que expresan alguna emoción a
determinadas acciones realizadas por el ser humano. En esta categoría también
se podrían considerar los drones.

